技 术
自动导航系统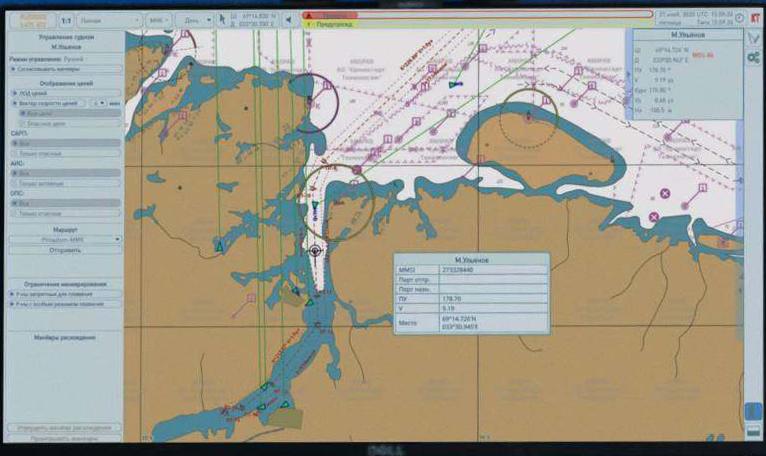
自动导航系统具有环境自动分析、船舶在自动模式和远程控制模式下沿给定路线通过、以及在考虑船舶参数和1972年国际海上避碰规则公约规定的情况下自动做出操纵船舶决策的功能。 自动导航系统包括导航信息处理子系统 (POI)、自动机动和偏离子系统 (PAMIR) 和自动导航系统的客户端(是电子制图系统的拓展功能)。
导航信息处理子系统实时接收并自动整合来自所有可用信息源(雷达站、自动信息站、全球卫星导航和定位系统、气象站等,包括监视和搜索系统)的关于目标情况、本船和交通状况的数据控制系统。同样,还可以借助自身的视觉和智慧收集和整合船上的数据。接收和整合的数据被实时传输到 自动机动和偏离子系统、自动导航系统的客户端(包括在远程控制面板上显示的全部数据)以及详细数据记录系统中。导航信息处理子系统还将有关已识别目标的数据传输到监视和搜索系统以便对后者进行统计和显示。
自动机动和偏离子系统根据航行任务(初步航线绘算)实时自动构建船舶航线,并根据1972年国际海上避碰规则公约的规定,使用关于目标环境、船舶本身、电能装置状态、航行控制系统的信息进行综合分析(包括考虑本船参数)。路线更改被发送到自动导航系统的客户端进行显示,也可以选择确认(当启用适当的自动转向选项时)。发出声音信号、信号灯和标志的命令被传输到船上的警报控制系统并显示在自动导航系统的客户端。
自动机动和偏离子系统提供持续的自动安全监控,以防止可能由于导航错误而引起接地、碰撞(撞击)的危险。这包括尽早采取行动以避免发生航行危险(进入具有特殊航行制度的区域),当船舶接近具有航行危险(危险区域)或具有特殊航行条件的区域时将发出警报。为了解决这个问题,自动机动和偏离子系统不断评估与航行危险(具有特殊航行制度的区域)相关的船舶位置。为了对自动机动和偏离子系统的算法进行开发,专家组根据1972年国际海上避碰规则公约的规定首次制定了明确的定义和清晰的算法,这将使国际空间站的管理变得完全可预测,甚至是与传统的人控制船相比。
自动导航系统的客户端以类似于电子制图系统的形式显示有关航行情况、船舶本身、航行控制系统状态以及自动机动和偏离子系统计算的路线和策略的实时信息,其中相关信息的形成方式为具有在它们之间选择/切换的能力的附加层。此外,自动导航系统的客户端允许远程控制面板的操作员或使用船桥平板电脑来铺设航行路线。自动导航系统的客户端是确保远程控制中心或船上的负责人员及时收到有关情况和自动导航系统计划决策的通知或警告的关键工具。在自动控制模式下确认策略的选项还允许使用自动导航系统的客户端来协调由远程控制面板操作员或船上人员进行自动计算的策略。自动导航系统的客户端安装在船上的远程控制面板和船桥平板电脑上。